![]()
�ځ@�@��
���T�v
�@�@�����o�R�}���h�i�z�X�g�˃}�E�X�j
�@�@���}�E�X����̉������b�Z�[�W�i�}�E�X�˃z�X�g�j
�@�@���X�g���[�~���O�E���[�h�J�n��̎�M�f�[�^�i�}�E�X�˃z�X�g�j
���C���^�[�t�F�[�X��H�̍\��
�@�@���C���^�[�t�F�[�X��H
�@�@���v���O�^�W���b�N�d�l
���M���̃^�C�~���O�K��Ƒ���M�V�[�P���X
�@�@���}�E�X����̃f�[�^�̎�M�^�C�~���O
�@�@���}�E�X����̃f�[�^�̎�M�V�[�P���X
�@�@���z�X�g����̃R�}���h���o�^�C�~���O
�@�@���z�X�g����}�E�X�ւ̃R�}���h���o�V�[�P���X
���v���O�������
�@�@���|�[�g���o�͗p�}�N��
�@�@���R�}���h���o�v���O�����iput_mouse�� .. 11�`50�s�ځj
�@�@���f�[�^��M�v���O�����iget_mouse1�� .. 52�`94�s�ځj
�@�@���X�g���[�~���O�E���[�h�E�f�[�^��M�v���O�����iget_mouse3�� .. 96�`114�s�ځj
�@�@���}�E�X�̏������v���O�����iinit_PS2�� .. 116�`125�s�ځj
�@�@���X�g���[�~���O�E���[�h�J�n�R�}���h���o�v���O�����istart_PS2�� ..
127�`134�s�ځj
�@�@�����C���E�v���O�����̗���
�����p�ɓ������Ă̏�����
�@�@���X�N���[���p�z�B�[���t���}�E�X�̏ꍇ
�@�@���Q�|�[�g�i�z�X�g�E�}�C�R�����j�ɂ��ڑ�
�@�@���}�C�R���̃N���b�N���x
���`�u�q�}�C�R���ɂ�������
�@�@����H�\��
�@�@���\�t�g�E�F�A�P ... �R�{�^���E�}�E�X�p
�@�@���\�t�g�E�F�A�Q ... �z�B�[���E�}�E�X�p
���Ō��
���Q�l�����^�t�q�k
�@�@(1)PS/2 technical reference manual October 1990 IBM Corp.
�@�@(2)http://www.mcamafia.de/pdf/pdfref.htm
�@�@(3)http://www.mcamafia.de/pdf/ibm_hitrc07.pdf
�@�@(4)http://www.computer-engineering.org/ps2mouse/
�@�@(5)���W*�o�b�C���^�[�t�F�[�X�̌����@��P�́@�L�[�{�[�h���}�E�X�E�|�[�g�̍\��
�@�@�@�@�g�c���@�g�����W�X�^�Z�p�@Oct. 1995
���T�v
�@�}�E�X�̓R���s���[�^�̓��͋@��Ƃ��Č������Ȃ����̂ł����C�}�C�R�����p�V�X�e���ɂ����Ă��Q�������W���̓��͂Ƃ��ė��p���邱�Ƃ��ł��܂��D���[�o�[���̃X�C�b�`����ƈقȂ�C�ړ������ƈړ����x�̏���͂ł��܂��̂ŁC�}�E�X�̑��쑬�x�ɂ��Ώۂ̑��x�𐧌䂷�邱�Ƃ��\�ƂȂ�܂��D���̂悤�ȑΏۂƂ��ăQ�[���̓��͋@���{�b�g�̑���p�̓��͋@��Ƃ��������p���l�����܂��D�܂��C�q���⍂��ҁC�g��҂����p���鑕�u�̂��߂́u��܂��ȑ���̂��߂̓��͋@��v�Ƃ��Ẳ��p���l�����܂��D
�@�����ł�PS/2�}�E�X�̂��߂̃C���^�[�t�F�[�X��H�Ɛ���\�t�g�E�F�A��������܂��D�ŋ߂̃p�\�R���ł́CUSB�}�E�X���嗬�ɂȂ��Ă��Ă��܂����C��p�f�o�C�X���g�p�����萧�䂪���G�Ȃ��Ƃ���_�ƌ����܂��D����ɑ���PS/2�}�E�X�̏ꍇ�́C�C���^�[�t�F�[�X��H�͂������ăV���v���ŁC���C�ȒP�ȃ\�t�g�E�F�A����ŗ��p���邱�Ƃ��ł��郁���b�g������܂��D
�@�ȉ��ł́C�z�X�g���̃}�C�R���E�V�X�e����P���z�X�g�ƁCPS/2�}�E�X��P���}�E�X�Ƃ��܂��D�܂��C�N���b�N�M���̓}�C�R���̃N���b�N�Ƌ�ʂ��邽�߁C�}�E�X�E�N���b�N�M�����邢�̓}�E�X�E�N���b�N�ƕ\�L���܂��D
�@�z�X�g�ƃ}�E�X�̊Ԃ́C�}�E�X�E�N���b�N�ƃf�[�^�̂Q�{�̐M�����ɂ�铯�����o�����V���A���ʐM�����Őڑ�����܂��D���̂Q�{�̐M�����́C�z�X�g�ƃ}�E�X�̗������o�͂���o�����̐M���ŁC���҂Ƃ��I�[�v���E�R���N�^�^�̃o�b�t�@�ŋ쓮���邢���郏�C���[�hOR�\�������܂��B
�@����M�̃f�[�^�͂W�r�b�g�i�P�o�C�g�j���P�P�ʂƂȂ�܂��D����M�M���̓X�^�[�g�E�r�b�g�ɑ����C�f�[�^�iLSB����MSB�̏��j�C��p���e�B�E�r�b�g�C�X�g�b�v�E�r�b�g�����т܂��D
�@�z�X�g������̃f�[�^�̏o�͂�T���v���̓}�E�X�E�N���b�N�ɓ������Ă����Ȃ��܂��D�}�E�X�E�N���b�N�̎����͍ŏ�60[��Sec]�C�ő�100[��Sec]�ƋK�肳��Ă���C�}�C�R���̃\�t�g�E�F�A�Ő���\�Ȕ͈͂ɂ���܂��D�܂��C�}�E�X�E�N���b�N�M���́C�z�X�g������̑��M�̍ŏ��i���M�v���̒ʒm�j�������C��{�I�Ƀ}�E�X���Ő������܂��D
�����o�R�}���h�i�z�X�g�˃}�E�X�j
�@�}�E�X�̓z�X�g�ɑ��ă}�E�X�̈ړ�����{�^���̑�����𑗏o���邱�Ƃ���{�@�\�ł����C�z�X�g������e��̃R�}���h���}�E�X�֑���D�ݒ��䂪�ł��܂��D��ȃR�}���h��\�P�Ɏ����܂��D
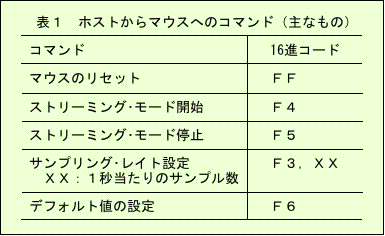
�@�����ŁC���ɏd�v�ȃR�}���h�̓��Z�b�g�ƃX�g���[�~���O�E���[�h�J�n�ł��D
�@�}�E�X�����Z�b�g�E�R�}���h(0xFF)����M����ƃZ���t�E�e�X�g���C���������܂��D�܂��C�}�E�X�̓X�g���[�~���O�E���[�h�J�n�R�}���h(0xF4)����M���邱�Ƃňړ�����{�^��������̑��o���J�n���܂��D
���}�E�X����̉������b�Z�[�W�i�}�E�X�˃z�X�g�j
�@�\�Q�Ƀ}�E�X����z�X�g�֑����郁�b�Z�[�W�̎�Ȃ��̂������܂��D
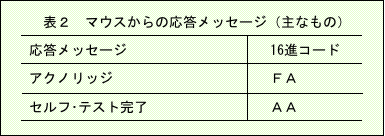
�@�}�E�X�̓z�X�g����̃R�}���h���t����ƁC�������b�Z�[�W(0xFA)��Ԃ��܂��D�܂��C���Z�b�g�E�R�}���h�ł́C�������b�Z�[�W�ɑ����C�Z���t�E�e�X�g�̊���������0xAA�ƃ}�E�XID(�R�{�^���E�}�E�X�̏ꍇ��0x00)��ԋp���܂��D�X�g���[�~���O�E���[�h�J�n�R�}���h�ł́C�������b�Z�[�W�ɑ����C�ړ�����{�^��������̑��o���J�n���܂��D
���X�g���[�~���O�E���[�h�J�n��̎�M�f�[�^�i�}�E�X�˃z�X�g�j
�@�}�E�X���X�g���[�~���O�E���[�h�ɐݒ肳���ƁC�}�E�X�͑���ɑΉ������R�o�C�g���P�Z�b�g�Ƃ������𑗏o���܂��D�}�E�X�����o����f�[�^�̌`����\�R(1)(2)�Ɏ����܂��D
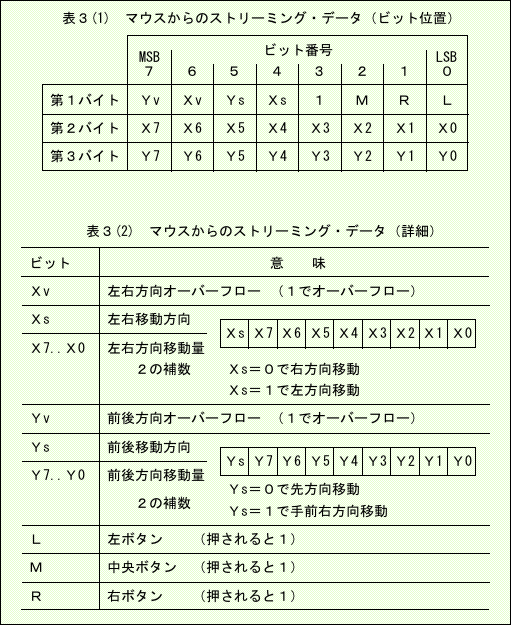
�@��P�o�C�g�ڂɂ̓I�[�o�[�E�t���[�C�ړ������C�{�^���̏Ȃǂ̏����܂��D�{�^���͉�����Ă���ꍇ�ɂP�ƂȂ�܂��D�{�^������Ɋւ��ẮC�{�^���������ꂽ���Ɨ����ꂽ���Ƀ}�E�X����̃f�[�^���o������܂��D
�@��Q�o�C�g�ڂ͉������̈ړ��ʂŁC��P�o�C�g�̃r�b�g�S�̈ړ������̏��iMSB�ƂȂ�j�ƍ��킹�ĂQ�̕␔�\���̂X�r�b�g�̏��ƂȂ�܂��D���������āC�ړ��ʂ́|�Q�T�U����{�Q�T�T�̒l���Ƃ�܂��D�E�����ւ̈ړ��́{�̒l�ŁC�������̈ړ��́|�̒l�ƂȂ�܂��D
�@��R�o�C�g�ڂ͏c�����̈ړ��ʂŁC��P�o�C�g�̃r�b�g�T�̈ړ������̏��iMSB�ƂȂ�j�ƍ��킹�ĂQ�̕␔�\���̂X�r�b�g�̏��ƂȂ�܂��D���l�ɁC�ړ��ʂ́|�Q�T�U����{�Q�T�T�̒l���Ƃ�܂��D�O�������ւ̈ړ��́{�̒l�ŁC��O�����̈ړ��́|�̒l�ƂȂ�܂��D
���C���^�[�t�F�[�X��H�̍\��
���C���^�[�t�F�[�X��H
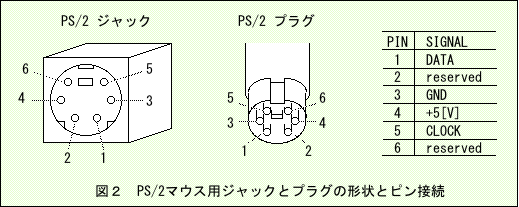
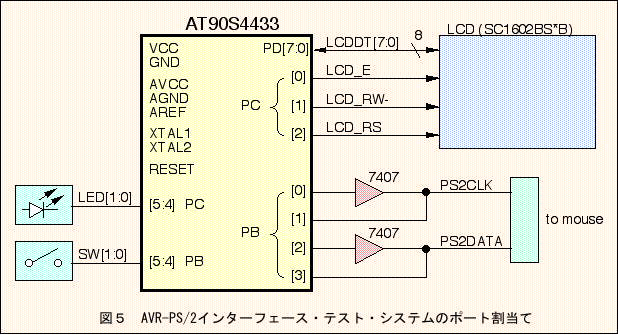
�@�z�X�g�ƃ}�E�X�Ԃ̐M���̓}�E�X�E�N���b�N�M���ƃf�[�^�M���̂Q�{����{�ƂȂ�܂��D���̑��C�}�E�X�ɓd�����������邽�߂̂T[V]���C���ƃO�����h�E���C��������܂��D�}�P�Ƀz�X�g�E�}�C�R���ƃ}�E�X�̃C���^�[�t�F�[�X��H�������܂��D
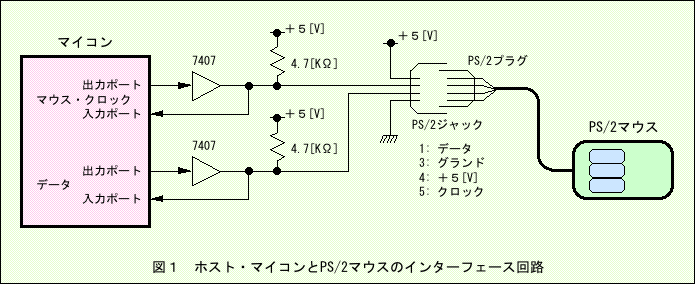
�@�}�E�X�E�N���b�N�M���ƃf�[�^�M���͑o�����̐M���ŁC�z�X�g������}�E�X������쓮�����M���ł��D���̂��߁C�ʏ�̃h���C�oIC�Őڑ����邱�Ƃ͂ł����C�I�[�v���E�R���N�^�^�̃o�b�t�@�i7407�Ȃǁj�Őڑ������K�v������܂��D�I�[�v���E�R���N�^�^�̃o�b�t�@�͏o�͕����Ƀn�C�E���x�����쓮����g�����W�X�^���Ȃ��C�o�͒[�q���R�Ńv���E�A�b�v���Ă����C�n�C�E���x�����m�ۂ��܂��D�܂�C�I�[�v���E�R���N�^�^�̃o�b�t�@���m��ڑ����Ă����C������̃o�b�t�@�����E�E���x�����o�͂��Ȃ��ꍇ�C�v���A�b�v��R�̓����ŐM�����C�����n�C�E���x���ɂȂ�d�g�݁i�����郏�C���[�h�n�q�j�ɂȂ��Ă��܂��D
�@�}�P�Ɏ������C���^�[�t�F�[�X��H�ł́C�z�X�g�E�}�C�R�����ŁC�N���b�N�M������������|�[�g�i�o�͒[�q�j�ɃI�[�v���E�R���N�^�^��IC(7407)���o�R���ă}�E�X�Ɛڑ����C�}�E�X���瑗���Ă���}�E�X�E�N���b�N�M���͕ʂ̃|�[�g�i���͒[�q�j�Ŏ܂��D�f�[�^�����l�ɏo�̓|�[�g�ɂ̓I�[�v���E�R���N�^�^���o�R���Đڑ����C�f�[�^���͕͂ʃ|�[�g�����蓖�ĂĂ��܂��D
���v���O�^�W���b�N�d�l
�@���Ƀz�X�g�ƃ}�E�X��ڑ�����v���O�ƃW���b�N�ɂ��Đ������܂��D�}�E�X�̃v���O�͂U�s���̃~�jDIN�ŃW���b�N�͂���ɑΉ�������̂��g�p���܂��i�H�t���Ȃǂŗe�Ղɓ���ł��܂��j�D�}�Q�Ɍ`��ƃs���ڑ��������܂��D
���M���̃^�C�~���O�K��Ƒ���M�V�[�P���X
���}�E�X����̃f�[�^�̎�M�^�C�~���O
�@�}�E�X����z�X�g�ւ̃f�[�^���o�^�C�~���O�́C�}�E�X����������}�E�X�E�N���b�N�ɓ������čs���܂��i�}�R�Q�Ɓj�D
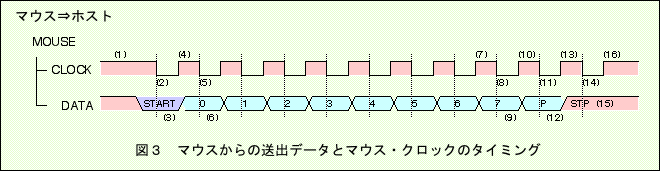
�@�}�E�X�����o����f�[�^�̓}�E�X�E�N���b�N�̗��オ��G�b�W�ŕω����܂��D�f�[�^�ω��̃^�C�~���O�K��͍ŏ��łT[��Sec]�C�ő�̓}�E�X�E�N���b�N�̃n�C���ԁ|�T[��Sec]�ƂȂ��Ă��܂��D
�@���������āC�z�X�g���̓}�E�X�E�N���b�N�̗�����G�b�W�Ńf�[�^���T���v���������ƂŁC���肵����̃f�[�^���擾���邱�Ƃ��ł��܂��D
���}�E�X����̃f�[�^�̎�M�V�[�P���X
�@�}�E�X���瑗�o�����f�[�^���z�X�g����M����V�[�P���X�͂��悻���̂悤�ɂȂ�܂��i�z�X�g���̊ϓ_�Ő����j�D
| �@�X�^�[�g�E�r�b�g�̌��o �@�E�}�E�X�E�N���b�N���̓|�[�g���n�C�E���x���ł��邱�Ƃ��m�F �@�@�|�������E�E���x���ł���G���[�Ƃ��� �@�E�}�E�X�E�N���b�N�̃l�K�e�B�u�E�G�b�W��҂� �@�E�f�[�^���̓|�[�g���`�F�b�N�����E�E���x���ł��邱�Ƃ��m�F �@�@�|�����C�n�C�E���x���ł���G���[�Ƃ��� �A�f�[�^�̎�M �@�E�}�E�X�E�N���b�N�̃l�K�e�B�u�E�G�b�W��҂� �@�E�f�[�^���̓|�[�g���T���v�����C��M�f�[�^�iLSB�j�Ƃ��� �@�E�c��̂V�r�b�g�̃f�[�^�i�ŌオMSB�j�ɂ��ē��l�ɌJ��Ԃ� �B�p���e�B�E�r�b�g�̎�M �@�E�}�E�X�E�N���b�N�̃l�K�e�B�u�E�G�b�W��҂� �@�E�f�[�^���̓|�[�g���T���v�����C��p���e�B���m�F���� �@�@�|�����C�P�̐��������Ȃ�G���[ �C�X�g�b�v�E�r�b�g�̎�M �@�E�}�E�X�E�N���b�N�̃l�K�e�B�u�E�G�b�W��҂� �@�E�f�[�^���̓|�[�g���T���v�����C�n�C�E���x���ł��邱�Ƃ��m�F���� �@�@�|�����C���E�E���x���Ȃ�G���[ �@�E�}�E�X�E�N���b�N���̓|�[�g���n�C�E���x���ɂȂ�̂�҂��C�I�� |
���z�X�g����̃R�}���h���o�^�C�~���O
�@�z�X�g������}�E�X�ւ̃R�}���h���o�͏��X���G�ł��D�ŏ��Ƀz�X�g�����}�E�X�E�N���b�N�E���C�������E�E���x���ɐݒ肷�邱�ƂŃ}�E�X���ɃR�}���h���o�v����`���C����ɑΉ����ă}�E�X������}�E�X�E�N���b�N�M�����o�͂���C����ɍ��킹�ăz�X�g�����f�[�^���o�͂��܂��i�}�S�Q�Ɓj�D
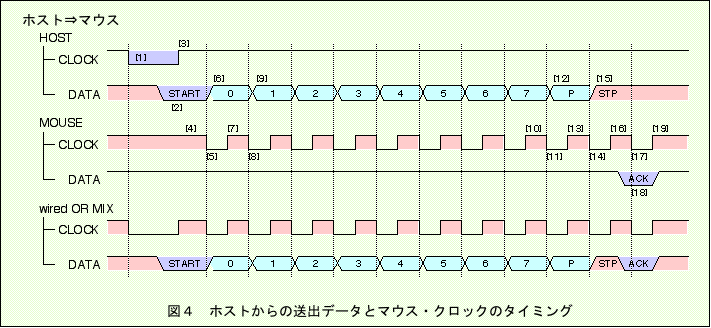
�@�}�S�ɂ����āC���i�ɂ���}�E�X�E�N���b�N�ƃf�[�^�̃y�A���M������̗l�q�ɂȂ�܂��D������₷���悤�ɁC���i�ɂ̓}�E�X���o�͂���M���l���C��i�ɂ̓z�X�g���o�͂���M���l�������Ă��܂��D
�@�z�X�g�̓}�E�X�E�N���b�N�̗�����G�b�W�ɓ������ăf�[�^���o�����܂��D�}�E�X�̓}�E�X�E�N���b�N�M���̗����Ńf�[�^���T���v�����܂��D�f�[�^�̓}�E�X�E�N���b�N�̗�����P[��Sec]�Ԃ͈���ɂ���K�v������܂����C�}�E�X�E�N���b�N�̗�����G�b�W�ɓ������ďo�͂��Ă�����̋K��͖����ł��܂��D
�@�z�X�g���Ō�̃X�g�b�v�E�r�b�g�𑗏o������C�}�E�X�̓f�[�^�E���C�������E�E���x���ɂ��ăA�N�m���b�W��Ԃ��܂��D
���z�X�g����}�E�X�ւ̃R�}���h���o�V�[�P���X
�@�z�X�g����}�E�X�ւ̃f�[�^�i�R�}���h�j�̑��o�̃V�[�P���X���z�X�g�̊ϓ_�����������Ƃ��悻���̂悤�ɂȂ�܂��D
| �@�z�X�g����}�E�X�ւ̑��M�v���̓`�B �@�E�}�E�X�E�N���b�N�o�̓|�[�g�����E�E���x���ɂ��� �@�E60����100[��Sec]�ԑ҂� �@�E�f�[�^�o�̓|�[�g�����E�E���x���ɂ���i���X�^�[�g�E�r�b�g�j �@�E�}�E�X�E�N���b�N�o�̓|�[�g���n�C�E���x���ɂ��� �@�E�}�E�X�E�N���b�N�̃l�K�e�B�u�E�G�b�W��҂� �A�f�[�^�̑��o �@�E���o�f�[�^��LSB���f�[�^�o�̓|�[�g�ɏo�͂��� �@�E�}�E�X�E�N���b�N�̃l�K�e�B�u�E�G�b�W��҂� �@�E�c��̂V�r�b�g�̃f�[�^�ɂ��ē��l�ɌJ��Ԃ� �B�p���e�B�E�r�b�g�̑��o �@�E�P�̐�����ɂȂ�悤�Ƀf�[�^�o�̓|�[�g��ݒ肷�� �@�E�}�E�X�E�N���b�N�̃l�K�e�B�u�E�G�b�W��҂� �C�X�g�b�v�E�r�b�g�̑��o �@�E�f�[�^�o�̓|�[�g���n�C�E���x���ɂ��� �@�E�}�E�X�E�N���b�N�̃l�K�e�B�u�E�G�b�W��҂� �D�]���I���m�F �@�E�f�[�^���̓|�[�g���`�F�b�N���C���E�E���x�����m�F����i�}�E�X�̎�M�A�N�m���b�W�j �@�E�}�E�X�E�N���b�N���̓|�[�g���n�C�E���x���ɂȂ�̂�҂��ďI�� |
���v���O�������
�@�����ł̓A�g�����Ђ̃}�C�R��AT90S4433�i�W[MHz]�j���^�[�Q�b�g���C�b����ŋL�q�����v���O�������ɉ�����܂��D�Ȃ��C�ʂ̃}�C�R���ł��ȒP�ɗ��p�ł���悤�ɁC�|�[�g�̓��o�͕��̓}�N�������Ă��܂��D���ۂɎg�p����}�C�R���ɍ��킹�ă}�N���̕ύX��������������őΉ��\�ɂȂ��Ă��܂��DAT90S4433�p�̎��ۂ̃v���O�����͌�̐߂ŏЉ�܂��D
�k���X�g�P�lPS/2�}�E�X����v���O�����i�s�ԍ��t�� PDF�j
�k���X�g�Q�lPS/2�}�E�X����v���O�����i�s�ԍ��Ȃ� TXT�j
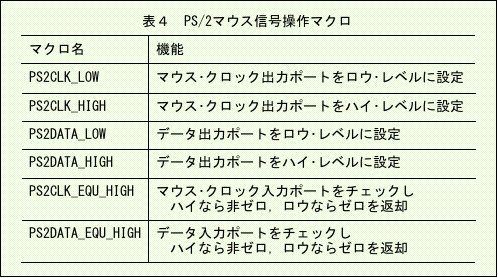
���|�[�g���o�͗p�}�N��
�@�\�S�Ƀv���O�����Ŏg�p���Ă���|�[�g�̓��o�̓}�N���������܂��D
���R�}���h���o�v���O�����iput_mouse�� .. 11�`50�s�ځj
�@�u�z�X�g����}�E�X�ւ̃f�[�^���o�v�Ő��������t���[�ɂ��������āC�v���O�������L�q���Ă��܂��D���X�g���̃R�����g��[1]�`[19]�͐}�S��[1]�`[19]�ƑΉ����Ă��܂��D
�@put_mouse���͑��M�f�[�^�������Ƃ��Ď��܂��Dput_mouse������17�s�ڂ�wait_60usec����60[��Sec]�Ԃ̑ҍ�����������ł��D
�@�p���e�B�́C�f�[�^�̑��o���Ƀn�C�E���x���ł���J�E���g���Ă����C�p���e�B�E�r�b�g�̑��o���Ɋ�^�����f���C���E�E���x���^�n�C�E���x���𑗏o���Ă��܂��D
�@�X�g�b�v�E�r�b�g���o��̓}�E�X����̃A�N�m���b�W�i�f�[�^���̓|�[�g�����E�E���x���j���m�F���C����Ƀ}�E�X�E�N���b�N���n�C�E���x���ɂȂ�̂��m�F���ďI�����Ă��܂��D
���f�[�^��M�v���O�����iget_mouse1�� .. 52�`94�s�ځj
�@�}�E�X����P�o�C�g���̃f�[�^����M������ŁC�u�}�E�X����̃f�[�^�̎�M�v�Ő��������t���[�ɂ��������ċL�q���Ă��܂��D���X�g���̃R�����g��(1)�`(16)�͐}�R��(1)�`(16)�ɑΉ����Ă��܂��D
�@get_mouse1���͎�M�f�[�^�̊i�[�ϐ��̃A�h���X�������Ƃ��Ď��C�}�E�X����̎�M�f�[�^���i�[���܂��D�܂��C���^�[���l�Ƃ��ăG���[����ԋp���܂��Dget_mouse1���̌ďo�����_�ł̓}�E�X�E�N���b�N���n�C�E���x���ł��邱�Ƃ�z�����Ă��܂��D�����C�}�E�X�E�N���b�N�����E�E���x���ł���ꍇ�̓G���[�Ƃ��ďI�����܂��D
�@�p���e�B�̃`�F�b�N�̓f�[�^�̎�M������уp���e�B�E�r�b�g�̎�M���Ƀn�C�E���x���ł���J�E���g���Ă����C���̏I����ԏ��Ƃ��ă��^�[���l�ɐݒ肵�܂��D
�@�X�g�b�v�E�r�b�g�̎�M�m�F��C�}�E�X�E�N���b�N���n�C�E���x���ɂȂ�̂�҂��ďI�����Ă��܂��D
���X�g���[�~���O�E���[�h�E�f�[�^��M�v���O�����iget_mouse3�� .. 96�`114�s�ځj
�@�}�E�X���X�g���[�~���O�E���[�h�ɐݒ肷��ƁC�}�E�X����ɉ����ĂR�o�C�g�̏���o����܂��Dget_mouse3���͂��̂R�o�C�g�̏��ƃX�e�[�^�X�i�G���[�����j��ԋp���܂��D
�@�}�E�X�̑���f�[�^�����ɂ����Ȃ��又���Ɏ��Ԃ�������ƁC�}�E�X�͎��̑���f�[�^�𑗏o���Ă��܂���������܂���D����f�[�^�̑��o�̓r�������M�������J�n����ƁC�z�X�g�͐���ȃf�[�^����M�ł��܂���D���̂��߁C�}�E�X�̈ړ����̂R�o�C�g����M����ꍇ�́C�}�E�X����̑��M�̓r���̏ꍇ�����o���ďI���܂ő҂��Ă���C�V�K�Ɏ�M�������J�n����悤�Ƀv���O�������쐬����K�v������܂��D���X�g�P�̃v���O������ł́C101�`108�s�ڂɂ����āC�}�E�X�E�N���b�N�������ԃn�C�E���x���ł��邱�Ƃ��m�F���Ă����M�������J�n����悤�ɂ��Ă���܂��D
���}�E�X�̏������v���O�����iinit_PS2�� .. 116�`125�s���j
�@�}�E�X�̏������v���O�����̓}�E�X�����Z�b�g����R�}���h�i0xFF�j�𑗏o���C�}�E�X����̃A�N�m���b�W�E���b�Z�[�W�i0xFA�j����M�C�����ŃZ���t�E�e�X�g����I�����b�Z�[�W�i0xAA�j����M���C�Ō�Ƀ}�E�X�h�c�R�[�h�i0x00�j�̎�M���ďI�����܂��D���̊��ł̓G���[����ԋp���܂��D
���X�g���[�~���O�E���[�h�J�n�R�}���h���o�v���O�����istart_PS2�� .. 127�`134�s�ځj
�@�X�g���[�~���O�E���[�h�J�n�R�}���h���o�v���O�����͂��̃��[�h�ɐݒ肷��R�}���h�R�}���h�i0xF4�j�̑��o���C�}�E�X����̃A�N�m���b�W�E���b�Z�[�W�i0xFA�j�̎�M���ďI�����܂��D���̊��ł��G���[����ԋp���܂��D
�����C���E�v���O�����̗���
�@�ȏ�C���������b������𗘗p���ă��C���E�v���O�������\������ƁC���̗l�ɂȂ�܂��D
| �@�}�E�X�̃��Z�b�g �@�@init_PS2���̌ďo�� �A�X�g���[�~���O�E���[�h�̐ݒ� �@�@start_PS2���̌ďo�� �B�}�E�X����f�[�^�̎�M�ƕK�v�ȏ��� �@�E�}�E�X����R�o�C�g��M �@�@�@get_mouse3���̌ďo�� �@�E�又�������s �@�E���[�v���ČJ��Ԃ� |
�����p�ɓ������Ă̏�����
���X�N���[���p�z�B�[���t���}�E�X�̏ꍇ
�@�ŋ߂̃}�E�X�̑����̓X�N���[���p�z�B�[���t���}�E�X�i�ȉ��C�X�N���[���E�}�E�X�j�ɂȂ��Ă��Ă��܂��D���̃X�N���[���E�}�E�X��ڑ�����ꍇ�͎�舵�������X�قȂ�܂��D�|�C���g�͎��̂R�_�ł��D
�@�E�z�B�[���@�\��L���ɂ��Ȃ���C�R�{�^���E�}�E�X�Ƃ��ċ@�\
�@�E����āC�z�B�[���@�\��L������ɂ͐ݒ肪�K�v
�@�E�z�B�[���̉�]���͑�S�o�C�g�ڂƂ��ĕt��
�@�z�B�[���@�\��L������ɂ́C�z�X�g����}�E�X�̃X�g���[�~���O�E���[�h�J�n�R�}���h�𑗏o����O�ɃT���v���E���C�g�ݒ�Ƃ��Ď��̂R�p�^�[���i�P�O�i���j�𑗏o���܂��D
�@�@�Q�O�O�@�ˁ@�P�O�O�@�ˁ@�W�O
�@�P�̃T���v���E���C�g�̃f�[�^�𑗏o������C�A�N�m���b�W�E���b�Z�[�W����M���Ă��玟�̂̃��C�g�E�f�[�^�𑗐M���܂��D
�@���̐ݒ���s������C�X�g���[�~���O�E���[�h�J�n�R�}���h�𑗏o���邱�ƂŁC�z�B�[���@�\���L���ɂȂ�܂��D
�@�z�B�[���@�\���L���ɂȂ�ƁC�}�E�X�̓z�B�[���̓����̏����S�o�C�g�ڂɕt�����đ��M���Ă��܂��D��P�����R�o�C�g�̏��͂R�{�^���E�}�E�X�Ɠ����ł��D��S�o�C�g�ڂ̏����Q�̕␔�ŕ\������Ă���C�z�B�[������O�ɉ�]������Ɓ{�l�ƂȂ�C�O���ɉ�]������Ɓ|�l�ƂȂ�܂��D
���Q�|�[�g�i�z�X�g�E�}�C�R�����j�ɂ��ڑ�
�@�z�X�g���̃}�C�R���̃|�[�g�ɂR�X�e�[�g�E�o�b�t�@���o�R�����o�͋@�\������C���o�͂̕����ݒ���v���O�����ɂ���ē��I�Ɂi�v���O�����̎��s���ɂ��ł��j�芷������ꍇ�C�}�E�X�E�N���b�N�̓��͂Əo�̓|�[�g���P�̃|�[�g�ɏW�Đ��䂷�邱�Ƃ��ł��܂��D���̏ꍇ�C�I�[�v���E�R���N�^�^�̃o�b�t�@IC���K�v����܂���D���l�Ƀf�[�^�̓��͂Əo�̓|�[�g���P�̃|�[�g�ɑΉ������邱�Ƃ��ł��C�Q�̃|�[�g�Ń}�E�X��ڑ����邱�Ƃ��ł��܂��D�������C�}�C�R���̃|�[�g�̃h���C�u�\�͂�}�E�X�̃P�[�u���̒����Ȃǂɂ���ẮC�M���̑���ɖ�肪�������邱�Ƃ�����܂��D
���}�C�R���̃N���b�N���x
�@�}�E�X�Ő��������}�E�X�E�N���b�N�M���́C�n�C�E���x�����ԁC���E�E���x�����ԂƂ��ɍŏ��l��30[��Sec]�ƋK�肳��Ă��܂��D�\�t�g�E�F�A�Ő��䂷��ꍇ�C�K�v�ȏ��������̊��ԓ��ɏI������K�v������܂��D�ᑬ�ȃN���b�N�Ń}�C�R���삳����ꍇ��P���߂ɑ����̃N���b�N��v���鏉���̃}�C�R���ł́C30[��Sec]�ԂɕK�v�ȏ������I�������C����ȑ��M�^��M���삪�ł��Ȃ��ꍇ������܂��D
���`�u�q�}�C�R���ɂ�������
�@�����ł́C�A�g�����Ђ̃}�C�R��AT90S4433�i�W[MHz]�j���g�����e�X�g�E�V�X�e���Ƃb����ŋL�q�����v���O������������܂��D�\�t�g�E�F�A�͂b����ŋL�q���CGNU��AVR�pgcc�ł���winavr�ŃR���p�C�����Ă��܂��D
����H�\��
�@�g�p�����}�C�R�����A�g�����Ђ�AT90S4433�ŁC�Q�W�s���̃X����DIP�p�b�P�[�W�̂W[MHz]�i�ł��D����m�F�p�Ƃ��Ăk�b�c�iSC1602BS*B�C�P�U�����w�Q�s�j�C�k�d�c�i�Q�j�CDIP�X�C�b�`�i�Q�j�𓋍ڂ��Ă��܂��i�ʐ^�P�j�D�}�C�R��AT90S4433�̂R�̃|�[�g�iPB[5:0]�CPC[5:0]�CPD[7:0]�j���}�T�Ɏ����悤�Ɏg�������Ă��܂��D�ڍׂ���H�}�͂������ɂȂ�܂��D

���ʐ^�P�@AVR-PS/2�C���^�[�t�F�[�X�E�e�X�g�E�V�X�e����
���\�t�g�E�F�A�P ... �R�{�^���E�}�E�X�p
�@�R�{�^����PS/2�}�E�X�̏������������Ȃ��C�}�E�X����̑���f�[�^���k�b�c�ɕ\������v���O�����ł��D�t�@�C���\���͎��̂Ƃ���ł��D
| �t�@�C���� | ���e | �敪 |
| AVRPS2_main.c | ���C���� | �b�\�[�X�E�t�@�C�� |
| AVRPS2_mouse.c | �}�E�X���䕔 | �b�\�[�X�E�t�@�C�� |
| AVRPS2_avrinit.c | AVR�������� | �b�\�[�X�E�t�@�C�� |
| AVRPS2_timer.c | �^�C�}�� | �b�\�[�X�E�t�@�C�� |
| AVRPS2_LCD.c | �k�b�c���䕔 | �b�\�[�X�E�t�@�C�� |
| AVRPS2_swLED.c | �X�C�b�`�E�k�d�c���䕔 | �b�\�[�X�E�t�@�C�� |
| const.h | ���ʒ萔��` | �w�b�_�E�t�@�C�� |
| avrps2.h | ���v���g�^�C�v�錾 | �w�b�_�E�t�@�C�� |
| mouse.h | AVR�|�[�g����}�N�� | �w�b�_�E�t�@�C�� |
| LEDconst.h | �k�d�c����}�N�� | �w�b�_�E�t�@�C�� |
| makefile | �R���p�C������ | make�t�@�C�� |
�@�v���O�����̃R���p�C���͏�L�S�Ẵt�@�C����K���ȃt�H���_�ɃR�s�[���āC make ���邾���ł��D
���\�t�g�E�F�A�Q ... �z�B�[���E�}�E�X�p
�@������̓z�B�[���t���}�E�X�p�v���O�����ł��D�قƂ�ǂ̕�������L�R�{�^���E�}�E�X�p�Ɠ����ł��D�قȂ镔�����@���C���E�v���O�����@�ŁC�X�N���[���E���[�h�p�̐ݒ�R�}���h�Ƃ��ăT���v���E���C�g�̐ݒ蕔��������܂��D
�@�܂��C�}�E�X����͂S�o�C�g���P�p�P�b�g�Ƃ��đ����Ă��邱�ƂɂȂ�܂��̂ŁCget_mouse3���ɑւ��Cget_mouse4��������܂��i�������
AVRPS2_main.c �ɂ���܂��j�D
�@�R���p�C�����邽�߂ɂ́C AVRPS2_main.c ��������L�t�@�C���S�ĂƁC�X�N���[���E�}�E�X�p���C�����̂���t�@�C���iAVRPS2_main.c�j��K���ȃt�H���_�ɃR�s�[���� make ���܂��D
�@����AVR-PS/2�C���^�[�t�F�[�X�E�e�X�g�E�V�X�e����Ƀz�B�[���E�}�E�X��ڑ����āC�}�E�X����̑���f�[�^��\���������Ă���Ƃ���̎ʐ^�������܂��D

���ʐ^�Q�@�V�X�e���E�e�X�g���̗l�q��
���Ō��
�@����,���̃��|�[�g�̍쐬�ɐ旧���CPS/2�}�E�X�E�C���^�[�t�F�[�X��Verilog-HDL�ŋL�q���ĉ�H�Ƃ���FPGA�Ɏ������e�X�g���Ă��܂��D�������ł�����C���J����\��ł��D